|
|
Site map :
Last upgrade to the site:
There has been
This is an unofficial LEGO® web site. Copyright 1996, 2000, Denis Cousineau
|
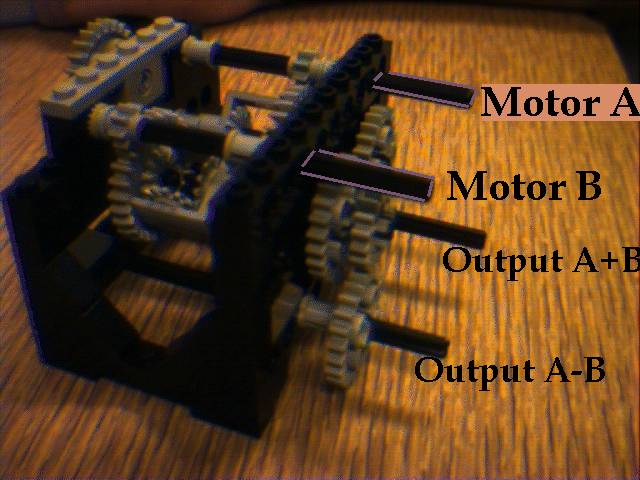
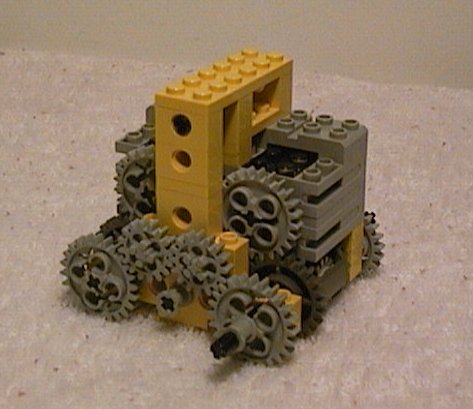
The smallest adder-subtracter ever designed!
The adder-subtracter device was first described in Leo’s Lego pages (see the links section). The idea of this mechanism is to add the power of two motors together, so that the output turns at the speed of both motors added. In addition, we can also subtract the rotation speed of one motor from the other, so that if both turns at the same speed, the net rotation speed of the subtraction is null. This mechanism is perfect for controlling a tank. One motor is used to move forward of backward the tank while the second controls the direction of the tank, making it turns right or left.
The same mechanism can be used in crane, where one cable moves the bucket closer or further away from the tower while the second moves it up or down. As the bucket goes away from the tower, the cable that moves it up must also extend, so that it remains at the same altitude. The first implementation was adapted from Leo’s Lego Design. There is some little difference since I used the different model of differential. In both case, it is rather cumbersome, and still requires supplementary gears to connect a motor to it.
By working out the problem, and trying to simplify it, I came with a much more compact implementation of the adder-subtracter. In fact, I don’t think it can be reduced anymore using Lego. Also, with the cable attach on the inner side, and bracing on top of the motors, this structure is very sturdy, and never broke.
|
|